
��ַ���߷������Ϲ���������2200̖
�Ԓ��0411-85647733
���棺0411-85647666
�]����116000
�W(w��ng)ַ��www.ynsfzy.com
���ּ��Tᔿ�λ�öȜy������
�l(f��)���r�g��2023-06-05
���S���s־�磩
ᘌ�������S�з��x�Ͱ뱣�ּ��Tᔿ��^С��������(bi��o)�y���C�y�^�ڿ����ƄӾ��x���ޣ��o���y����λ�öȵĆ��}���������S��W(xu��)�y���x������1/2Z��O��ƫ�������������ژO����(bi��o)ϵ���F(xi��n)��С����λ�öȵĜy������ͨ�^������C��ԓ�����Ŀ����ԡ�
����������S�з��x�Ͱ뱣�ּܣ��Tᔿ��T�ϵĜ�(zh��n)�_�̶țQ�����ּܵĽY(ji��)��(g��u)���ȣ��Ķ�Ӱ��S�Љ������S���ӹ��O(sh��)����Ԅӻ��Լ��ӹ���ˇ�ĸ��M���Tᔿӹ�����Ҳ�S֮����������C�Tᔿӹ����Ȳ��ṩ�y����(sh��)��(j��)��ָ��(d��o)�ӹ��������M���Tᔿ�λ�öȜy����
ͨ��������������(bi��o)�y���C�y����λ�öȣ������Tᔿ�С��0.9 mm�İ뱣�ּܣ���������(bi��o)�y�^ֱ���c�y�^�ڿ����ƄӾ��x�����ƣ��o���y����λ�öȡ����Q��Ƶ�С����λ�öȟo���y���Ć��}���Lԇ�������S��W(xu��)�y���x�M�зǽ��|�y������ͨ�^ԇ��(sh��)��(j��)������C��ԓ�����Ŀ����ԡ�
1���y��ԭ��
���S��W(xu��)�y���x�Ǽ���W(xu��)���Cе����ӡ�Ӌ��C�D��̎���ȼ��g(sh��)��һ�w�Ĝy���x�������Ը߾��ȡ���Ч�ʵy�����N��(f��)�s�����ijߴ硢�Ƕȼ�λ�õȡ�
1.1 �y���������^��
���x�Ͱ뱣�ּ��Tᔿײ����⏽��λ�ӹ��Ҿ���ֲ��ڱ��ּܱ��棬���������(zh��n)��ͨ�^�A�ߌ��뱣�̶ּܹ��ڜy��ƽ�_���m��(d��ng)λ�á�
1.1.1 �ֽ�����(bi��o)ϵ
�����y���������S��W(xu��)�y���xƽ�_���m��(d��ng)λ�ù̶�������(j��)�ӹ���λ��ʽ�y������(zh��n)�A�����R�^��������(zh��n)�A���ģ����x��y��z�S����(bi��o)����ɹ�����λ��
1.1.2 ��������(bi��o)ϵ
�ڻ���(zh��n)�A�Ϝy��һ�c������(j��)����(zh��n)�Aֱ���Ĵ�С��д��c6~12�β�ʹ������w�����A�ܣ��ԄӜy�������c��(sh��)�����y���c�M�Ϟ����(zh��n)�A���xȡ����һ���Tᔿ��M��ȫ�ԄӜy�������õ��Ļ���(zh��n)�A���TᔿA��(g��u)������(bi��o)ϵx��y��z�S����ɾ�������(bi��o)ϵ����D1��ʾ��
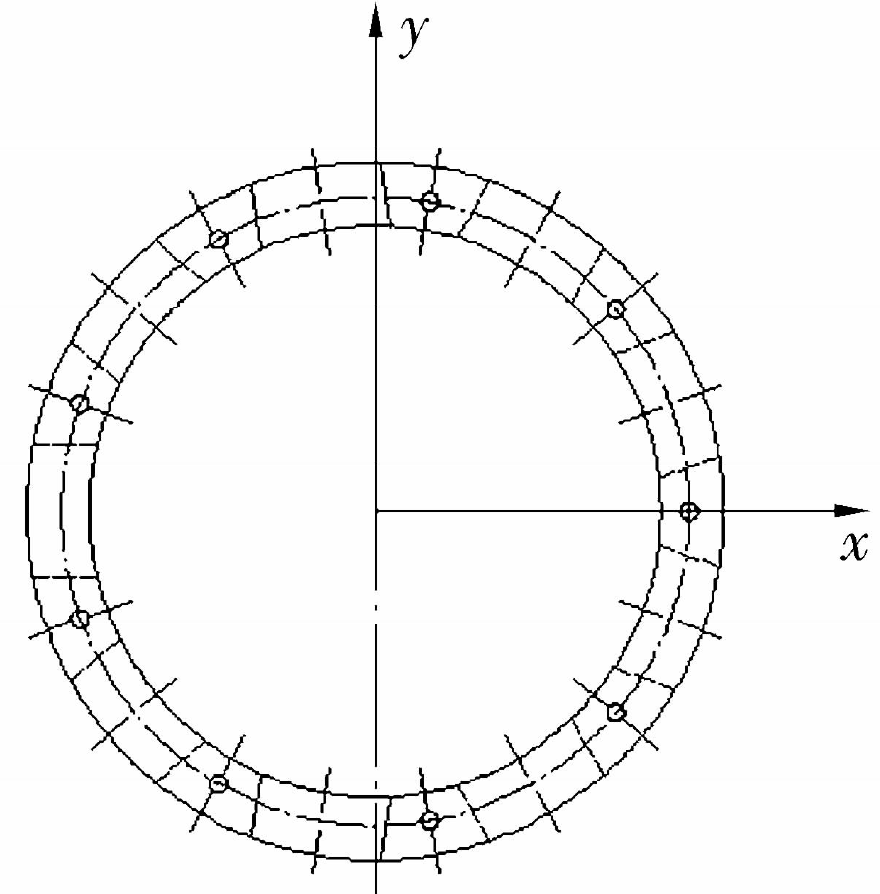
�D1 ��������(bi��o)ϵ
1.1.3 �ԄӜy���Tᔿ�
�y������һ���Tᔿף���(f��)�ƴ˿לy����ʽ���ГQ���O����(bi��o)����д˿ף���дΔ�(sh��)����(j��)���H�ה�(sh��)�Q�����ԄӜy�������Tᔿס�
1.1.4 �u�rλ�ö�
�ژO����(bi��o)ϵ���x������һ���ף��c��Nominal���I����F(xi��n)ԓ�טO����(bi��o)�µĘO���͘O�ǣ�����(j��)�D��Ҫ����Փֵ�c����ݔ������(y��ng)�������ØO�Ǻ͘O��Ӌ��λ�öȡ�����ԓ���E����Ӌ������Ŀ�λ�öȡ�
1.2 �y���^���еĔ�(sh��)��(j��)̎��
�Tᔿ�λ�öȜy�����ژO���͘O�ǵ�ƫ���M��Ӌ�㣬�y���r��������һ���מ����(zh��n)���u�r�����λ�öȕr����(d��o)�����wƫ�x���Qֵ���@���������пĘO�Ǿ�ƫ�x���Qֵ�������x�Ͱ뱣�ּ��Tᔿӹ��^���и��������(zh��n)��������һ�����������(zh��n)�M���u�r�����ό��HҪ��
ͬ�ӣ���������(bi��o)�y���C�Ϝy���������(zh��n)�Ŀ�λ�öȕr�����������һ�����������(zh��n)�M���u�r��������ÿ�����܉�һ���ĽǶȣ�����ͨ�^����(bi��o)ϵ���D(zhu��n)�M���u�r�����D(zhu��n)ԭ�t��ѭ1/2����ԭ�t��Ȼ�������S��W(xu��)�y���x�o�����D(zhu��n)����(bi��o)ϵ���о���Q�����ØO�������ķ����M���u�r����������(sh��)��O��ƫ��Z��O���1/2����D2��ʾ��

�D2 �O��ƫ��ʾ��D
���O(sh��)���x�Ͱ뱣�ּ��Tᔿ�10�ȷ֣��t�TᔿטO�ǹ��Qֵα=360°/10=36°���O(sh��)�y�����Tᔿ��ĘO�����O�Ƿքe��Di��βi���t���טO��ƫ��θi��

�O��ƫ�������ֵδ��

����(j��)ֱ������(bi��o)ϵ�c�O������(bi��o)ϵ���D(zhu��n)�Q�P(gu��n)ϵ������������ĘO�ǡ��O���M��λ�ö�φ���u�r����

ʽ�У�r0��O�����Qֵ��
����(j��)(3)ʽ�ó���λ�öȼ��錍�H��Ҫ��λ�öȣ�ԓ�yֵ���Է�ӳ��λ�ö��Ƿ�ϸ�����ָ��(d��o)���H�ӹ���
2��ԇ���C���Y(ji��)������
ij���S�а뱣�ּ��Tᔿ���0.7 mm, 14�ȷ�,���ď����Q�ߴ��(41.9±0.04)mm��λ�ö�Ҫ���0.03 mm����δ�����Ĝy���Y(ji��)������1����֪�xȡ����һ�����������(zh��n)�M���u�r������׳�һ��Ҏ(gu��)����׃��������(zh��n)��λ�ö��^С�����������׃С(�D3)��
��1 δ����λ�öȵĜy���Y(ji��)��
mm
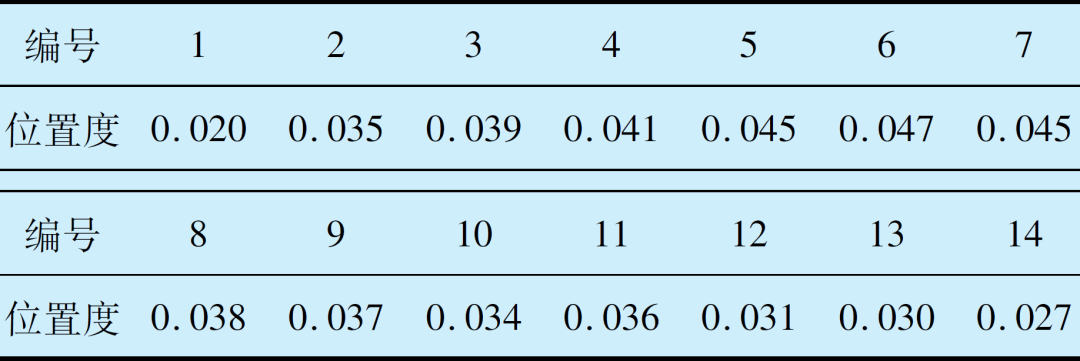

�D3 ����ǰ���λ�ö�
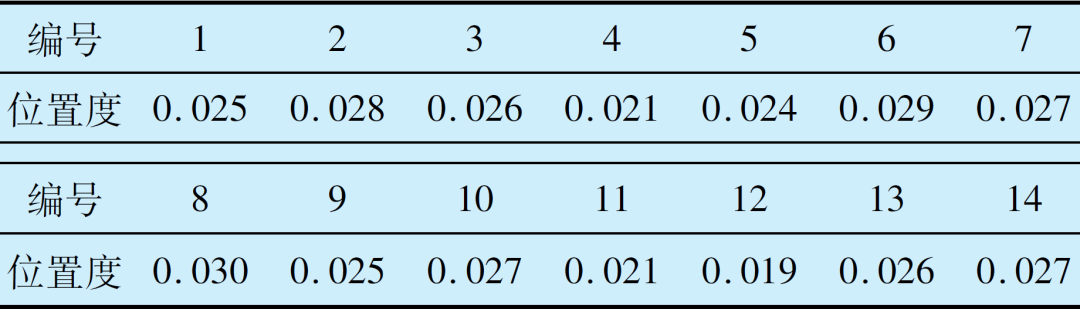
���ØO��ƫ��Z��O���1/2�M��������Ĝy���Y(ji��)��Ҋ��2���ɱ���֪��λ�ö��ںϸ���(n��i)�����������λ�öȷֲ����D3�������ό��HҪ��
��2 ������λ�öȵĜy���Y(ji��)��
mm
����Cԓ�����Ŀɿ��ԣ���ԓ��̖�S�а뱣�ּܿ�λ�ö��؏�(f��)�y��10�Σ���Ӌ��y����(sh��)��(j��)��ƽ��ֵ����(bi��o)��(zh��n)��Y(ji��)��Ҋ��3:14����λ�öȜyֵ�Ę�(bi��o)��(zh��n)��Z���0.001 mm���xɢ���^�ͣ��y����(sh��)ֵ�ɿ����yֵ���_���Ȳ����^0.003 0 mm��ͬ���f��ԓ�����Ĝyֵ��(zh��n)�_�ɿ���
��3 λ�ö��؏�(f��)�Ԝy���Y(ji��)��
mm

3���Y(ji��)���Z
ͨ�^�о����x�Ͱ뱣�ּ��TᔿĜy��ԭ�����Y(ji��)��������(bi��o)�y���C�������(zh��n)��λ�öȜy�������������S��W(xu��)�y���x�ϲ���1/2Z��O��ƫ�������������F(xi��n)�˷��x�Ͱ뱣�ּܿ�λ�öȵĜy����ͨ�^������Cԓ������Ч���У��Ҝy���Y(ji��)���؏�(f��)�ԝM��x��Z�����S�`��xɢ���^�ͣ��yֵ�ɿ�����Q��С����λ�öȟo���y�����y�}��Ŀǰԓ�������ڌ��H���a(ch��n)�y���еõ���(y��ng)�á�
�������īI�ԣ�
��Դ�����S�С�2021��9��
���ߣ��O���أ���Է壬���ƿ�
���ĸ�ʽ��
�O���أ���Է壬���ƿ�.���ּ��Tᔿ�λ�öȜy������[J].�S�У�2021��9����65-67.
 ����朽�
����朽� �P(gu��n)ע�҂�
�P(gu��n)ע�҂�
�֙C�˾W(w��ng)վ

�پW(w��ng)
���(qu��n)@2017�߷������S�йɷ�����˾ �|ICP��19015531̖-1
 ��Ϣ
��Ϣ ���F
���F
